KETI
2020.08 ~ 2020.12
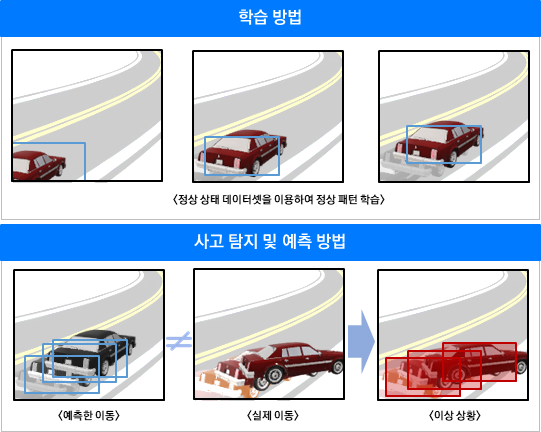
교통사고 탐지
Python, keras, pytorch, Yolov4, DeepSort, FlowNet2.0, ORBSLAM2
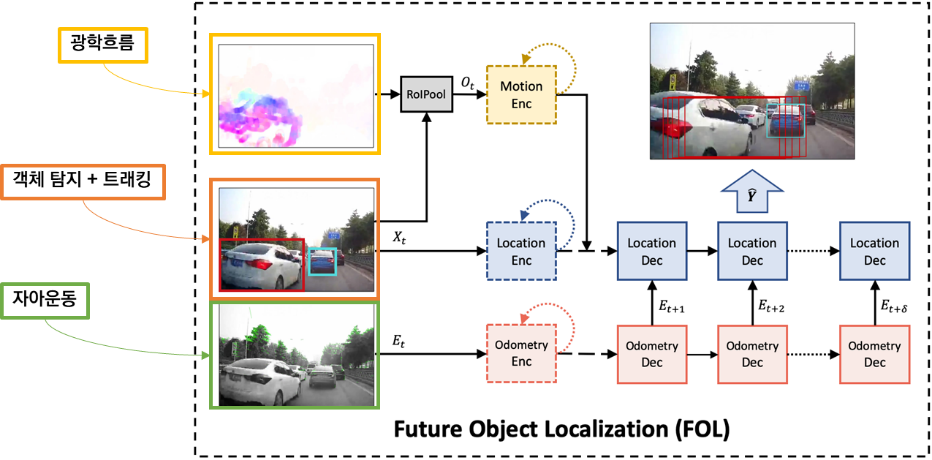
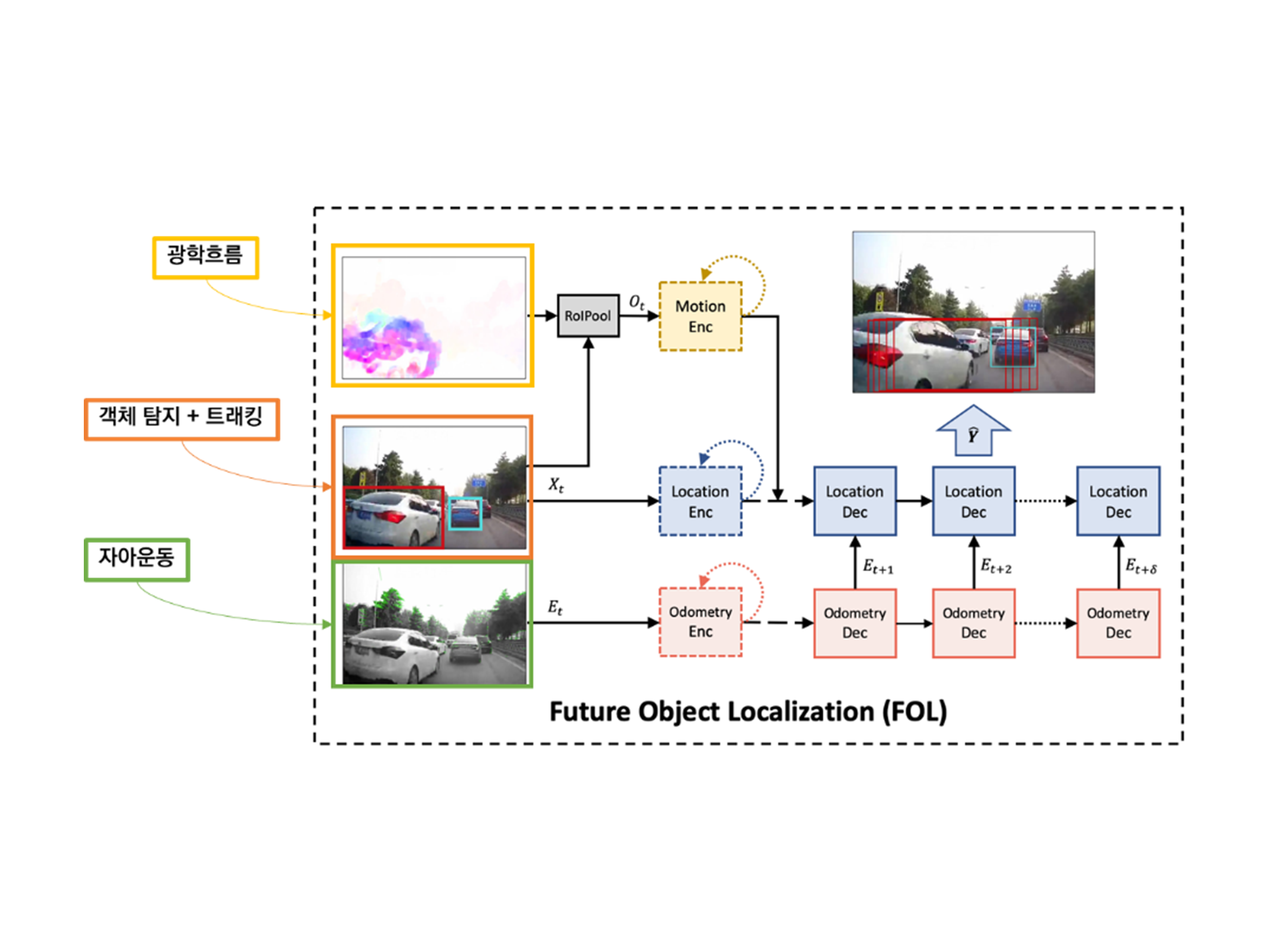
Traffic Accident Detection
Connected Vehicles (CV) Traffic Accident Detection
Traffic Accident Detection
Connected Vehicles (CV) Traffic Accident Detection
KETI
2020.08 ~ 2020.12
교통사고 탐지
Python, keras, pytorch, Yolov4, DeepSort, FlowNet2.0, ORBSLAM2
Description
본 프로젝트는 전자기술연구원(KETI)에서 진행되는 프로젝트로 데이터 및 코드는 대외비 입니다.
데이터, 코드를 제외한 프로젝트 과제 내용만 공유합니다.